- マシン規定:
- 本体の大きさは,直径30cmの円内に収まるもの(突起物を含む).
- 電源は外部から供給し,家庭用電源(AC100V)から生成できる 弱電に限る.
- CPUに類する制御装置は,本体に搭載してはいけない.
制御は,EIA-232-E 経由で UNIX Workstation から行い, C 言語で制御ソフトウェアを作成する.
制御ソフトウェアはスタート動作 のみ可能で,競技場情報などのパラメータを渡すことは禁止とする.
例外事項:
競技中に得られた情報を蓄積し,それを利用することは可能 とする.但し,他人と情報の共有をしてはいけない.
- 電源供給部およびEIA-232-E接続部は,作成する車の設計者同士で 協議し,コネクタ1つもしくは2つで容易に脱着できるようにして おくこと.
- 駆動力は,電気モーターとゴムタイヤで得るものとする.
- センサーは後述の競技場のラインが判定できるものを作成する.
- 競技場のいかなる物体も汚損してはいけない.
- 本体の配線は,すべて半田付けもしくはかしめること.
- 競技場規定:
- 情報科学科G棟4Fの廊下で行う.
- 使用するラインは,白色ビニールテープであり,幅10mm~15mmのもの とする.
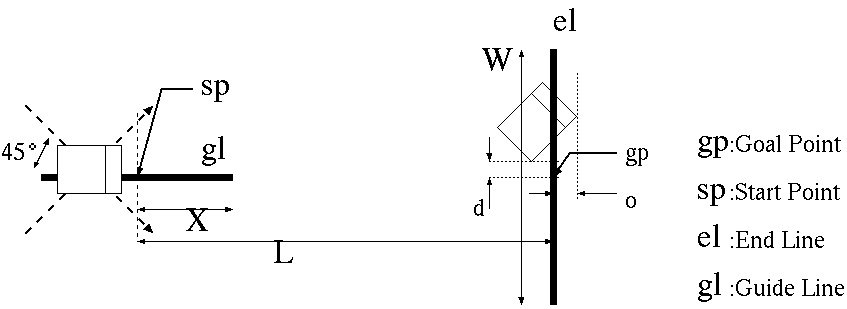
- ガイドライン(gl)が X cm引かれている.
- ガイドライン(gl)の一端から L cm離れたところにエンドライン(el)が 長さ W cmで引かれている.但し,[elの中点] は,[gl]
の延長線上 に存在しており,[gl]と[el]は垂直である. [gl]の中点をスタートポイント(sp),[el]と[glの延長線]の交点を
ゴールポイント(gp)と呼ぶ(上図).
- X は 30 ~ 100, L は 200 ~ 600, W は 100 ~ 200 とする.
- 競技方法:
- 2つのチームに分けて,車体の作成を行う.
- 各チームの各人が,制御ソフトウェアを作成する.
- 各人の制御ソフトウェア毎に以下を実行し,後述の評価方法で 評価の良さを争う.
- 車体をスタートポイント(sp)の後ろでかつ,ガイドライン(gl)上に かかるように設置者が置く.但し,ガイドラインのエンドライン側と
本体の前直進方向との角度差は ±45°以内とする.
- 設置者は,1. ソフトウェア作成者, 2. 敵チームの一人, 3. 審判団 の一人の3種類である.
- X, L, W は競技場の条件で任意に審判団が3種類用意する. (註: ソフトウェア作成者につき試技は9回)
- 評価方法:
- 制御ソフトウェアの実行を開始してから,本体が停止するまでの 時間を,S 秒とする.但し,本体がエンドライン(el)に触れずに止まった
場合は無限大とみなす.
- 本体が停止した状態で,スタートポイント(sp)からもっとも遠い 本体上の点とエンドライン(el)のスタートポイント(sp)から遠い側
の最短距離を O cmとする.
- 本体が停止した状態で,本体上の点のうちゴールポイント(gp) からの最短距離を D cmとする.
- 評価は,E = S+O+D で行い,小さい方が良い.各値は,小数点以下 第一位を四捨五入し整数値にしてから評価する.
- 以下に挙げる状態に陥った場合は,S = 無限大 とみなす.
- 制御プログラムが終了しても本体が停止しなかった場合
- 実行開始後10分を越えて動き続けた場合
- 制御プログラム実行開始後に人間の手が触れた場合
- 制御プログラム実施者がリタイアを申し出た場合
- 本体が,競技場外に出た場合
- drivers point は,自分の制御ソフトウェアの実行後, 無限大でない E のうち,最大値と最小値を持つものを除いてから平均を
取ったものとする.
- constructors point は,チームのすべての E のうちから,無限大で ない E
のうち,最大値と最小値を持つものを除いてから平均を取ったも のとする.
|
